Nézze meg a sporthíreket is
Nézze meg a sporthíreket is
Csatlakozzon hozzánk közösségi oldalainkon is!
Svájci kutatók olyan robotrepülőkből álló légiflottát terveztek, melynek tagjai vezeték nélküli hálózaton keresztül kommunikálnak egymással, és teljesen automatikusan repülnek. A gépek mozgását egy földi számítógép irányítja, s ez gondoskodik arról, hogy a repülők ne ütközzenek össze.
A háztartásokban és közterületeken is elterjedt vezeték nélküli adatátviteli rendszer, az úgynevezett wifi alkalmazására eddig is számos érdekes példa volt, egy svájci, kutatásokkal is foglalkozó mérnöki iskola azonban egy teljesen új területen is igyekszik meghonosítani a rendszert. A program lényege, hogy terepen is gyorsan telepíthető hálózatot építenek ki, melynek segítségével apró, nagyon könnyű robotrepülőgépek egész raját irányíthatják.
A polipropilénből készült sárkányszerkezetű, leginkább repülőmodellekre emlékeztető robotrepülőgépeket egyszerű robotpilótával, giroszkóppal, GPS-szel és egy könnyű kis motorral szerelik fel, a köztük lévő kapcsolatot pedig wifi segítségével oldják meg. Egy LINUX operációs rendszerrel ellátott, wifi antennával felszerelt központi számítógépen futó szoftver irányítja az akár 10 tagból álló "légiflottát". A program a GPS jelek alapján számolja ki minden egyes gép számára az optimális repülési profilokat, elkerülve az ütközéseket. Lényegében az egyes gépek egymást is irányítják, hiszen mozgásuk alapvetően meghatározza a szomszédaik mozgását is. Végeredményben egy összehangolt, megkoreografált égi balett jön létre, ahol a gépek egy képzeletbeli térháló bizonyos celláiban a wifin keresztül kapott jelek alapján manővereznek.

Fantáziarajz a repülő robotokról
A Wi-Fi (WiFi, Wifi vagy wifi) egy vezeték nélküli mikrohullámú kommunikációt (WLAN) megvalósító, széleskörűen elterjedt szabvány (IEEE 802.11) közismert neve, melyet leginkább adatátvitelre használnak. Érdekesség, hogy kísérleti jelleggel több, mint 90 kilométer távolságba is sikerült már wifin keresztül egy darab antenna segítségével adatot továbbítani. |
Így zajlanak a légiflotta kísérletek
A rendszer iránt természetesen a katonai alkalmazók is élénken érdeklődnek, a harcterek felett ugyanis egyre nagyobb a felderítő és csapásmérő pilótanélküli robotrepülőgépek "sűrűsége", ezek mozgásának összehangolására egy megfelelően levédett és titkosított rendszer nagyon hasznos lenne.
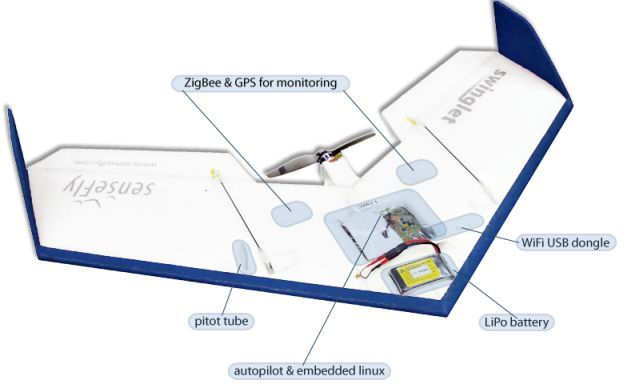
A szárnyvégi fülekkel ellátott csupaszárny szerkezet meghajtásáról apró beépített motor gondoskodik egy légcsavar segítségével. Ez utóbbi energiaellátását lítium-ion akkumulátor biztosítja. A sárkányszerkezetben integráltan kaptak helyet a robotpilótát jelekkel ellátó wifi és GPS antennák, valamint a sebesség mérésére szolgáló pitot-cső.
A pilótanélküli robotrepülőgépek (UAV) térhódításának következtében az afganisztáni és az iraki hadszíntéren is egyre nagyobb problémát okoz a különböző fegyvernemek repülőinek összehangolása. Ezek a gépek ugyanis nemcsak egymással, hanem az ember vezette gépekkel is ütközhetnek, illetve ha elveszítik felettük az irányítást, akkor önállósíthatják magukat. Igaz, ebben az esetben a beépített önmegsemmisítő még azelőtt felrobbanthatja a szerkezetet, mielőtt az lakott területre zuhanna. Ha egységes hálózatba lenne foglalva az irányításuk, akkor még nagyobb tömegben lennének bevethetők egy adott terület felett az ütközés és egymás zavarása nélkül. |
origo.hu

Itt a magyar hokiszövetség nyilatkozata
mandiner.hu

Figyelem! Jönnek a viharok, komoly bajra figyelmeztetnek
borsonline.hu

Tóth Gabi nem titkolja tovább: romokban van az élete
hirtv.hu

Bayer Zsolt: Gazember a családban
life.hu

A szülőkön múlik, hogy jó testvérek lesznek-e a gyerekek
vg.hu

Olajat talált a Mol Magyarországon
ripost.hu

Vasvári Vivien szívfacsaró üzenettel tett vallomást
origo.hu

Drámaian megváltoztak a Beverly Hills 90210 sztárjai az elmúlt harminc év alatt - képek
origo.hu

Minden száj tátva marad a Real-sztár őrjítően szexi, új barátnőjének fehérneműs képeitől - galéria
videa.hu

Alu paratha, a burgonyával töltött boldogságlepény -receptvideó ( hirdetés)
origo.hu
